
極座標
極座標は極\((x,\,y\,\textsf{平面座標、または直交座標でいうところの原点})\)から座標点までの距離と方角を課題とした座標系である。
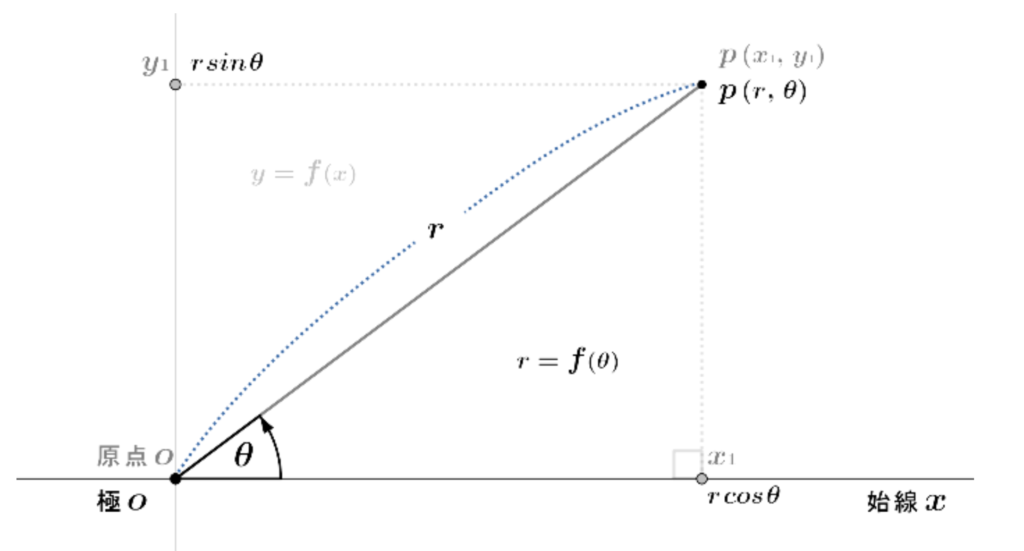
図\(1\)で極座標と直交座標\((\textsf{グレーの表記})\)を比較した。
極\(\large o\)から座標点\(p\)までの距離\(\,\overline{op}{\small\,=\,}r\)、\(o\)から水平方向に始線\({\large x}(\textsf{直交座標の$x$軸})\)と\(\overline{op}\)が成す仰角は\(\theta\)。
直交座標の\(\color{gray}x{\tiny 1}\)を極座標に変換すると\(rcos\theta\)、\(\color{gray}y{\tiny 1}\)は\(rsin\theta\)。\(\hspace{15pt}\)☜ \(\href{https://showanojoe.com/template-math/trigonometric-function/extension-trigonometric-ratios/#1}{\color{teal}\textsf{単位円上の三角比}}\)の式変形
極座標点\(p\)の座標は\(p(r,\,\theta)\)となる。\(p(rcos\theta,\,rsin\theta)({\small\leftarrow}\;\textsf{これは極座標点を直交座標に変換した座標})\)ではないので注意 !
\(3\)次元空間の全ての座標点を直交座標では \((x,\,y,\,z)\) の\(3\)変数で標記できる。
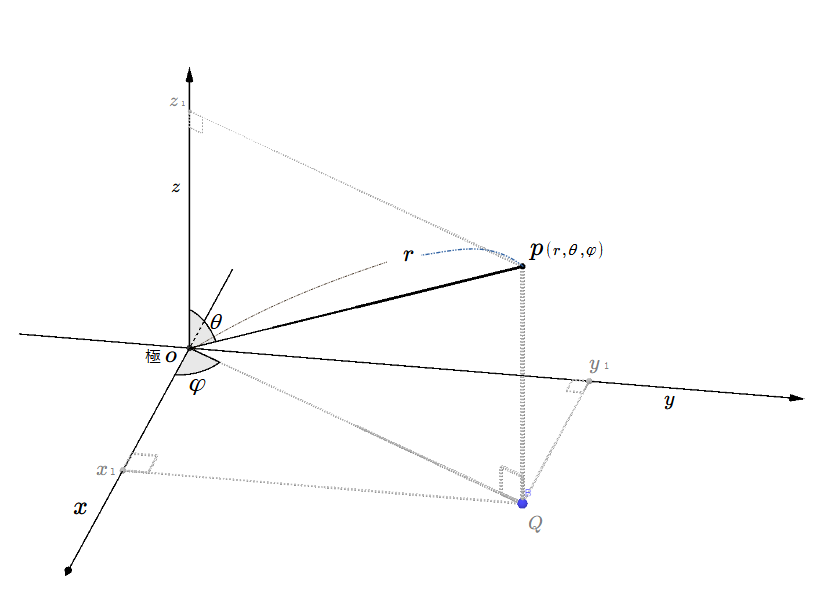
同様に、極座標の任意の座標点 \(p\) は \((r,\,\varphi,\,\theta)\) の\(3\)変数で表せる\((\small\textsf{図$2$})\)。これは地球上のある位置を特定する経緯度を連想させる。
つまり、\(r=\textsf{地球の半径}\)、\({\small\displaystyle\frac{\pi}{2}\,-\,}\theta=\textsf{緯度}\)、\(\varphi(\small\textsf{ファイ})=\textsf{経度}\)である。
点\(p\)の極座標から直交座標への変換は、\(\left\{\begin{array}{l}{\color{gray}x{\tiny 1}}{\scriptsize\,=\,}rsin\theta cos\varphi \\ {\color{gray}y{\tiny 1}}{\scriptsize\,=\,}rsin\theta sin\varphi \\ {\color{gray}z{\tiny 1}}{\scriptsize\,=\,}rcos\theta \end{array}\right.\) となる\((\small\textsf{以下の解説メモを参照})\)。
図\(2\)から、とりあえず線分\({\color{gray}z{\tiny 1}p}\) に着目する。
まずは 直角三角形\(o{\color{gray}z{\tiny 1}}p\) から\({\color{gray}z{\tiny 1}}=rcos\theta\)であることは自明である。
次に着目した線分 \(\overline{{\color{gray}z{\tiny 1}}p}\)\({\small\;=\;}\overline{o{\color{gray}\small Q}}\) なので、\(\overline{{\color{gray}z{\tiny 1}}p}\)\({\small\;=\;}rsin\theta\) ということは \(\overline{o{\color{gray}\small Q}}\)\({\small\;=\;}rsin\theta\) なので \({\color{gray}x{\tiny 1}}{\small\;=\;}rsin\theta cos\varphi\)。
それで、\({\color{gray}y{\tiny 1}}{\small\;=\;}rsin\theta sin\varphi\)。
以上から、\(p(rsin\theta cos\varphi,\,rsin\theta sin\theta,\,rcos\theta)\) と変換される。
ちなみに、 経緯度から直交座標への変換はまた別の課題である。
\(2\)点間の距離
平面の極座標
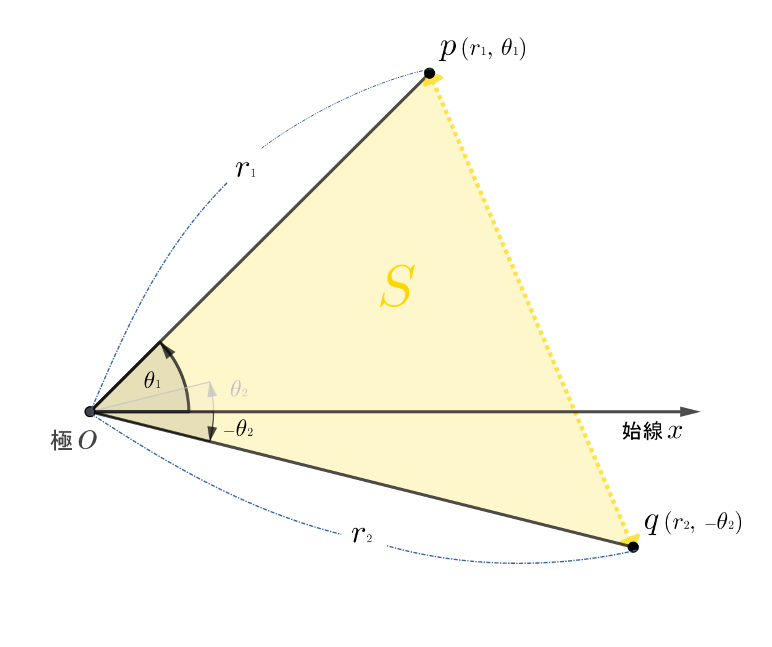
\(\triangle opq\) の面積\(\color{gold}S\)を考慮して、
\(\measuredangle{poq}\)\({\scriptsize\,=\,}\theta{\tiny 1}{\boldsymbol\scriptsize -}({\scriptsize -}\theta{\tiny 2})\)\(\hspace{15pt}\)\({\lbrace}\)\({\small\leftarrow} \hspace{5pt}\)\(|\theta{\tiny 1}{\scriptsize\,+\,}{\small |}{\scriptsize -}\theta{\tiny 2}{\small |}|\) ということだが、\(2\)重絶対値はややっこしいので演算子を \(\boldsymbol{-}\) にする\(|\theta{\tiny 1}{\boldsymbol\scriptsize -}({\scriptsize -}\theta{\tiny 2})|\)。\(\href{https://showanojoe.com/template-math/trigonometric-function/extension-trigonometric-ratios/#1}{\color{teal}{cos(\theta{\tiny 1}{\small -}({\scriptsize -}\theta{\tiny 2})){\small\,=\,}cos(({\scriptsize-}\theta{\tiny 2}){\small -}\theta{\tiny 1})}}\) なので 絶対値が不要となり \(\theta{\tiny 1}{\boldsymbol\scriptsize -}({\scriptsize -}\theta{\tiny 2})\)。\(\rbrace\)
\(\overline{op}{\scriptsize\,=\,}r{\tiny 1}\)\(,\,\overline{oq}{\scriptsize\,=\,}r{\tiny 2}\)
以上の提示から 三角関数の\(\href{https://showanojoe.com/template-math/trigonometric-function/cosine-theorem/}{\color{teal}\textsf{余弦定理}}\)で図\(3\)の \(2\)点間の距離 \(\overline{pq}\) が求められる。
\[(\overline{pq})^{\scriptsize 2}{\scriptsize\;=\,}r{\tiny 1}^{\scriptsize 2}{\scriptsize\;+\;}r{\tiny 2}^{\scriptsize 2}{\scriptsize\;-\;}2r{\tiny 1}r{\tiny 2}\,cos(\theta{\tiny 1}{\small -}({\scriptsize -}\theta{\tiny 2})){\small\hspace{10pt}\rightarrow\hspace{10pt}}\overline{op}{\scriptsize\;=\;}\sqrt{r{\tiny 1}^{\scriptsize 2}{\scriptsize\;+\;}r{\tiny 2}^{\scriptsize 2}{\scriptsize\;-\;}2r{\tiny 1}r{\tiny 2}\,cos(\theta{\tiny 1}{\small -}({\scriptsize -}\theta{\tiny 2}))}\]
\(3\)次元空間の極座標
\[\overline{op}{\scriptsize\;=\;}\sqrt{r{\tiny 1}^{\scriptsize 2}{\scriptsize\,+\,}r{\tiny 2}^{\scriptsize 2}{\scriptsize\,-\,}2r{\tiny 1}r{\tiny 2}\lbrace cos(\varphi{\tiny 1}{\scriptsize\,-\,}\varphi{\tiny 2})sin\theta{\tiny 1}sin\theta{\tiny 2}{\scriptsize\,+\,}cos\theta{\tiny 1}cos\theta{\tiny 2}}\]
\(p\,(x{\tiny 1}{\scriptsize\,=\,}r{\tiny 1}sin\theta{\tiny 1}cos\varphi{\tiny 1},\,y{\tiny 1}{\scriptsize\,=\,}r{\tiny 1}sin\theta{\tiny 1} sin\varphi{\tiny 1},\,z{\tiny 1}{\scriptsize\,=\,}r{\tiny 1}cos\theta{\tiny 1})\)\(\hspace{15pt}\lbrace\hspace{5pt}{\small\leftarrow}\hspace{5pt}\)極座標点 \(p\) を直交座標に変換した値。\(\rbrace\)
\(q\,(x{\tiny 2}{\scriptsize\,=\,}r{\tiny 2}sin\theta{\tiny 2}cos\varphi{\tiny 2},\,y{\tiny 2}{\scriptsize\,=\,}r{\tiny 2}sin\theta{\tiny 2} sin\varphi{\tiny 2},\,z{\tiny 2}{\scriptsize\,=\,}r{\tiny 2}cos\theta{\tiny 2})\)\(\hspace{15pt}\lbrace\hspace{5pt}{\small\leftarrow}\hspace{5pt}\)極座標点 \(q\) を直交座標に変換した値。\(\rbrace\)
\(\overline{pq}{\scriptsize\;=\;}\sqrt{(x{\tiny 1}{\scriptsize\,-\,}x{\tiny 2})^{\scriptsize 2}{\scriptsize\,+\,}(y{\tiny 1}{\scriptsize\,-\,}y{\tiny 2})^{\scriptsize 2}{\scriptsize\,+\,}(z{\tiny 1}{\scriptsize\,-\,}z{\tiny 2})^{\scriptsize 2}}\)\(\hspace{15pt}\lbrace\hspace{5pt}{\small\leftarrow}\hspace{5pt}\)\(3\)次元空間の直交座標における\(2\)点間の距離\((\textsf{ここでの$\overline{op}$})\)の定義式。\(\rbrace\)
\({\phantom{\overline{op}}}{\scriptsize\;=\;}\sqrt{r{\tiny 1}^{\scriptsize 2}{\scriptsize\,+\,}r{\tiny 2}^{\scriptsize 2}{\scriptsize\,-\,}2r{\tiny 1}r{\tiny 2}\lbrace cos(\varphi{\tiny 1}{\scriptsize\,-\,}\varphi{\tiny 2})sin\theta{\tiny 1}sin\theta{\tiny 2}{\scriptsize\,+\,}cos\theta{\tiny 1}cos\theta{\tiny 2}}\)\(\hspace{15pt}\lbrace\hspace{5pt}{\small\leftarrow}\hspace{5pt}\)上記の定義式を展開して極座標から直交座標に変換した値を代入する。\(\rbrace\)
極方程式
平面の極座標 \((r,\,\theta)\)、\(3\)次元空間の極座標 \((r,\,\varphi,\,\theta)\) にある点が描く軌跡\((\)図形\()\)を 関数 \(r{\small\;=\;}{\large f}{\small(\theta)}\)、\(r{\small\;=\;}{\large f}{\small(\varphi,\,\theta)}\) に従って表した方程式を \({}^{\scriptsize {“}}\,\textsf{極方程式}^{\,\scriptsize{”}}\) という。

\(\color{gray}[\textsf{事例$1$}]\)
図\(1\)の直線 \(\color{red}l\) の極方程式を求めてみる。
この事例の解法には\(\href{https://showanojoe.com/template-math/trigonometric-function/}{\color{teal}\textsf{三角関数}}\)を用いる。
極\(\large o\)から直線\(\color{red}l\)に引いた垂線\(r\)の足を点\(q\)とし、\(\color{red}l\)の極方程式を導く座標変数\(r\)、\(\theta\)をおいた。
\(\triangle{oq{\color{blue}p}}\)は中心角\(\theta{\small\,-\,}{\color{blue}\scriptsize\displaystyle\frac{\pi}{12}}\) の直角三角形なので、\(\href{https://showanojoe.com/template-math/trigonometric-function/cosine-trigonometric-ratio/#直角三角形の三角比}{\color{teal}\textsf{直角三角形の三角比}}\)より、\(cos(\theta{\small\,-\,}{\color{blue}\scriptsize\displaystyle\frac{\pi}{12}})\)\({\small\;=\,}\small\displaystyle\frac{r}{\color{blue}r{\tiny 1}}\) したがってこの事例の直線\(\color{red}l\)の極方程式は \({r}{\small\;=\,}{\color{blue}r{\tiny 1}}\,cos(\theta{\small\,-\,}{\color{blue}\scriptsize\displaystyle\frac{\pi}{12}})\) となる。
\(\color{gray}[\textsf{事例$2$}]\)
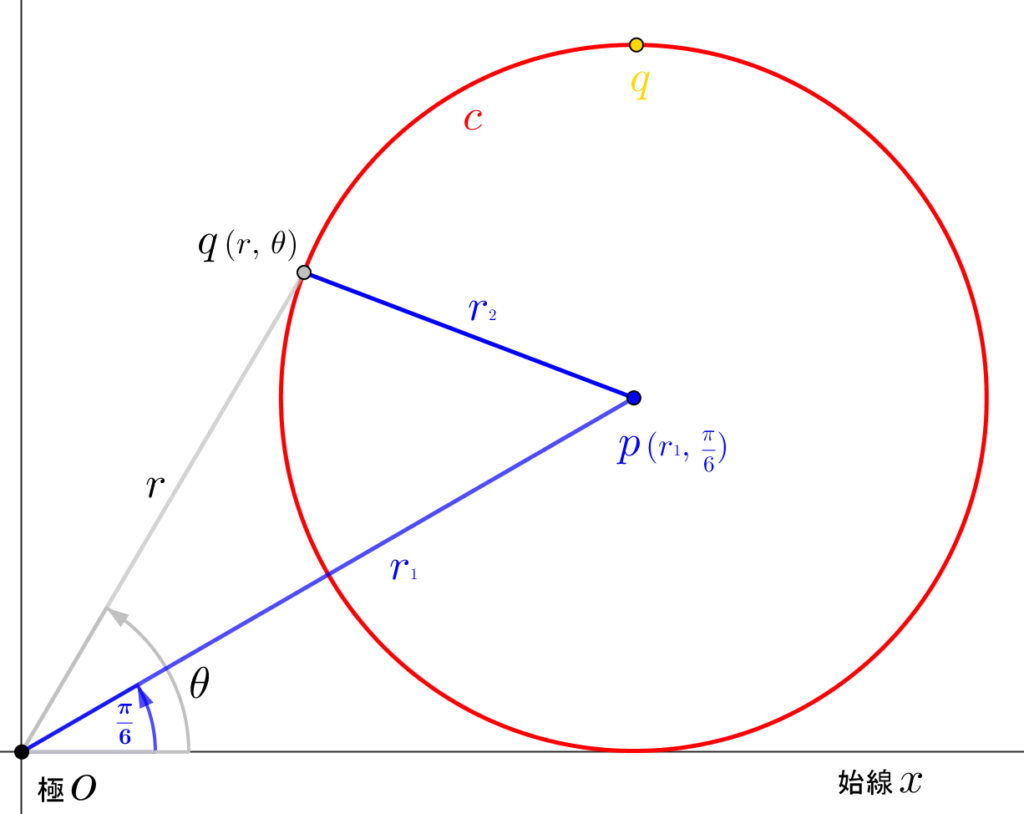
図\(2\)の円 \(\color{red}C\) の極方程式を求めてみる。
ちなみに、円の方程式とは\(\,?\)\(\hspace{15pt}\)\((\)\(\hspace{5pt}{\small\leftarrow}\hspace{5pt}\)雛形数学二部の\(\href{https://showanojoe.com/template-math/supplementary-material/equation-circle/}{\color{teal}\textsf{円の方程式}}\)を参照。\()\)
この事例の解法には三角関数を用いる。
円も他の図形と同様、その線上\((\)円周上\()\)にある点の軌跡が成す図形なので、\(\color{red}C\)の円周上に\(q\)を採った円の極方程式はその軌跡を移動する動点\(\color{gold}q\)を採った式\((\)円の極方程式\()\)と同じ、つまり \(\triangle{o{\color{blue}p}q}\)\({\small\;=\;}\triangle{o{\color{blue}p}\color{gold}q}\)となる。
\(\triangle{o{\color{blue}p}q}\)から、辺\(r\)と\(\color{blue}r{\tiny 1}\)に挟まれた\(\measuredangle{qo{\color{blue}p}}\)は \(\theta{\small\,-\,}{\color{blue}\scriptsize\displaystyle\frac{\pi}{6}}\) であることに着目して\(\href{https://showanojoe.com/template-math/trigonometric-function/cosine-theorem/}{\color{teal}\textsf{余弦定理}}\)から、
\(r^{2}{\small\;=\;}{\color{red}r}^{2}{\small\,+\,}{\color{blue}r{\tiny 1}}^{2}{\small\,-\,}2\,{\color{red}r}\,{\color{blue}r{\tiny 1}}\,cos(\theta{\small\,-\,}{\color{blue}\scriptsize\displaystyle\frac{\pi}{6}})\)。
極方程式の形式、左辺を\(r{\small\,=}\) に整理するとこの事例の答えは、
\(r{\small\;=\;}\sqrt{{\color{red}r}^{2}{\small\,+\,}{\color{blue}r{\tiny 1}}^{2}{\small\,-\,}2\,{\color{red}r}\,{\color{blue}r{\tiny 1}}\,cos(\theta{\small\,-\,}{\color{blue}\scriptsize\displaystyle\frac{\pi}{6}})}\) である。